# 点云数据
# 导入点云
#  功能说明
功能说明
点云数据(point cloud data)是指在一个三维坐标系统中的一组向量的集合。扫描资料以点的形式记录,每一个点包含有三维坐标,有些可能含有颜色信息(RGB)或反射强度信息(Intensity)。
目前MapGIS支持las格式的点云数据。
- las格式是一种二进制文件格式,用于提供一种开放的格式标准,允许不同的硬件和软件输出可互操作的统一格式。
MapGIS支持将las格式的点云数据导入为点简单要素类,方便对点云数据的编辑处理操作。
#  操作说明
操作说明
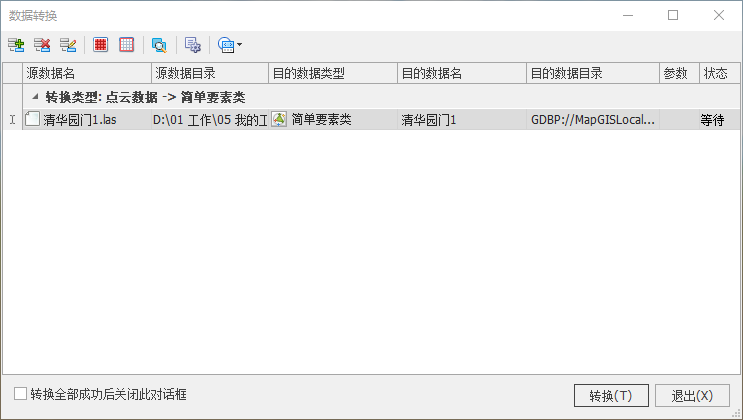
点击【数据】菜单下的【导入点云数据】,弹出导入模型数据对话框,添加las格式的数据,设置目的存储路径,目前支持数据导入到MapGISLocalPlus数据库中。其他的参数设置同普通模型导入,详细设置可参照前文“导入模型”章节。
# 点云建模
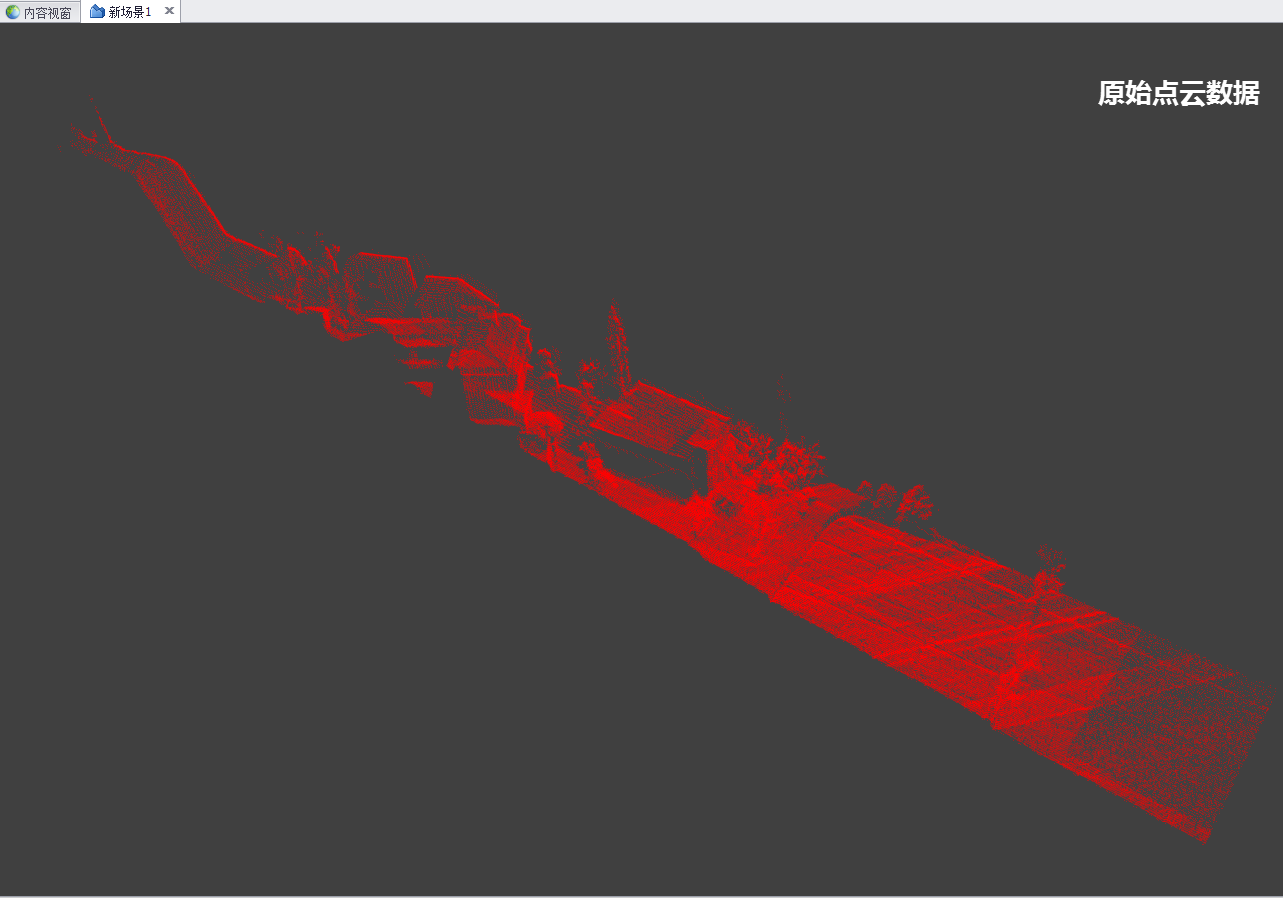
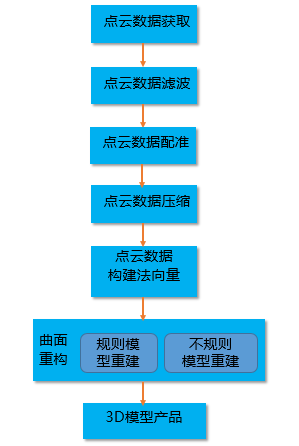
点云建模即将离散的点构建成实体模型。在MapGIS中,点云建模的基本过程包括:点云数据获取、点云数据滤波、点云数据配准、点云数据压缩、点云数据构建法向量、点云数据曲面重构(构建三角网) 最终模型产品(3D模型 其他应用 )。
点云数据一般是扫描仪采集获取。
点云滤波是点云处理的基本步骤。在获取点云数据时,由于设备精度,操作者经验环境因素带来的影响,以及电磁波的衍射特性,被测物体表面性质变化和数据拼接配准操作过程的影响,点云数据中不可避免的出现一些噪声。只有在滤波预处理中将噪声点、离群点、孔洞等处理后,才能够更好的进行配准、特征提取、曲面重建、可视化等后续应用处理。MapGIS中点云滤波模块提供了很多灵活实用的滤波处理算法,例如:双边滤波,低通滤波等。
点云压缩是结合实际应用需求,在不影响建模效果的前提下,对点云数据的冗余部分进行抽稀处理;压缩后的点云数据,在进行建模时,可相对提高建模效率。
点云数据配准过程,就是求一个两个点云之间的旋转平移矩阵,将源点云(source cloud)变换到目标点云(target cloud)相同的坐标系下的过程。
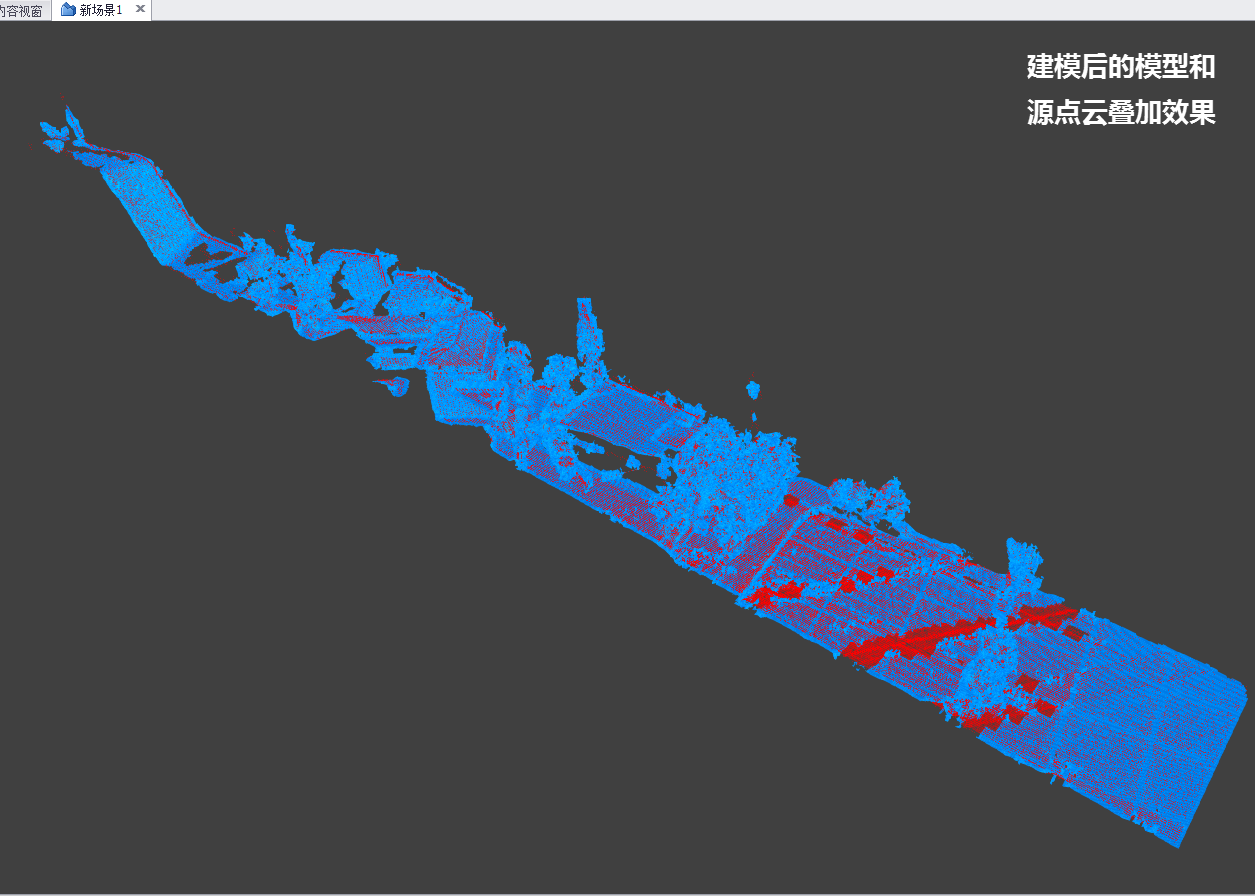
点云数据曲面重构即将已完成法向量构建的具有顶点坐标的点云数据进行三角网网格创建。完成曲面重构后,即可输出完美的点云模型。
# 操作说明
功能主界面:
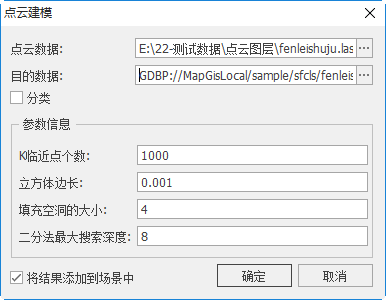
1. 点击点击【数据】菜单下的【点云建模】,弹出点云建模对话框;
2. 点云数据选择las图层数据的存储路径;
3. 目的数据选择目录树下的数据库位置;
4. 参数设置主要用于调整点云生成过程的精细程度。
如下图示例点云建模展示: